
En los institutos de Ingeniería (II) y de Investigaciones en Materiales (IIM) de la UNAM se desarrollan microrrobots que emulan el nado de microorganismos, no sólo porque científicamente eso ayuda a responder preguntas de la biología, la física e ingeniería, sino por sus potenciales aplicaciones en la industria, como la revisión de tuberías, y en tamaños aún más pequeños, nanométricos, para “destapar” arterias o depositar medicamentos de manera localizada.
Desde el punto de vista biológico, explicó Francisco Godínez, del II, es importante estudiar ese nado porque aún se desconocen los procesos de concepción, por mencionar un caso. “Si pensamos en un espermatozoide parece ser claro que tiene un flagelo que se mueve, pero a ciencia cierta no se entiende cómo se desplaza en la mucosidad vaginal”.
La mayoría de fluidos biológicos muestran adelgazamiento y viscoelasticidad; esa mucosa presenta este tipo de comportamiento y el espermatozoide está “diseñado” para desplazarse más rápido en ese medio pero, en cambio, no podría hacerlo de manera tan eficiente en agua.
Desde la óptica de la hidrodinámica y de la física, no se entienden los procesos que utilizan los microorganismos para moverse. En ingeniería es importante imitarlos con microrrobots que tengan diversas aplicaciones.
Godínez explicó que nadan a un bajo número de Reynolds, parámetro adimensional que relaciona las fuerzas de inercia con las fuerzas viscosas, y que simplemente significa que no tienen inercia. A diferencia de un humano o una ballena que dejan de patalear o aletear y se siguen desplazando, en el caso de esos microorganismos, si dejan de mover el flagelo, instantáneamente quedan quietos.
El equipo, donde también participa Roberto Zenit, del IIM, ha construido tres diferentes tipos de microrrobots para extrapolar los resultados y explicar qué pasa. Tomaron como modelo a los espermatozoides y a la bacteria Escherichia coli, que tiene una cabeza elipsoidal y varios flagelos que se enrollan y forman una especie de hélice rígida, con la que se impulsan en su medio, normalmente agua sucia.
En un tercer modelo, con un filamento altamente flexible, se pretende modificar la cinemática del robot para estudiar cómo se desplaza en diferentes fluidos.
Se realizó un estudio comparativo entre el comportamiento de estos nadadores y “encontramos que no existe una respuesta general para explicar el nado de este tipo de dispositivos”.
En realidad, se debe tomar en cuenta cómo se excitan para que se muevan en un medio, es decir, cómo se controlan inalámbricamente; también, la geometría del nadador y, por último, el medio o el tipo de fluido donde se desplazan.
Los microrrobots, que han sido presentados en congresos de la American Physical Society, no son sólo de tamaño milimétrico (con alrededor de 30 milímetros: 10 o 12 de cabeza y 20 de cola), sino de bajo costo, porque están hechos de materiales sencillos, como resortes de pluma, cilindros de poliestireno (popotes) y un imán permanente que puede estar ubicado en la “cabeza” o en medio del “cuerpo”. Las “colas” son de fibra óptica para emular el nado del espermatozoide y filamentos de látex, para el caso de E. coli.
En el cuerpo o cabeza se atrapa una burbuja de aire para lograr una flotación neutra; de otro modo, tiende a irse hacia arriba o hundirse. Para darles movimiento, se emplean bobinas Helmholtz, un arreglo de alambres enrollados por los cuales se pasa corriente eléctrica para generar un campo magnético, en rotación.
Justo en el centro del par de bobinas se coloca una pecera con mezclas de glucosa y agua, o poliacrilamida, que es un polímero; el movimiento de estas últimas hace que el imán dentro de la cabeza del “nadador” se empate con las líneas de campo de las bobinas, y entonces el robot rota y se desplaza.
Durante sus investigaciones, en las que se videograba y estudia el desempeño y velocidad de los nadadores, Godínez y sus colaboradores encontraron que robots “multicolas” presentan un incremento sustancial de la velocidad, en comparación con los que utilizan una sola. “Con varias colas se pueden impulsar mejor”, dijo.
Asimismo, hallaron que de las tres geometrías propuestas, la que imita a E. coli es la que tiene mejor desempeño. “Como ingeniero puedo tomar estrategias para diseñar un sistema más eficiente. Si se requiere algo pequeño, que nade rápido y ocupe poco espacio, se debe utilizar una cola en forma de hélice rígida”.
Aunque las aplicaciones de estas investigaciones pueden ser útiles en la industria, los resultados que emanan tienen validez y se pueden extrapolar a los nanorobots, que se ocupan en la biomedicina. Puede haber una retroalimentación.
Algunos resultados ya han sido publicados, como es el caso del artículo reciente «Complex fluids affect low-Reynolds number locomotion in a kinematic-dependent manner», incluido en la revista Experiments in fluids.
Asimismo, se ha establecido una estrecha colaboración con Erik Lauga, de la Universidad de Cambridge, quien es referencia en el tema y estudia locomoción en fluidos.
Además, se proyecta introducir este tipo de nadadores en medios granulares, en peceras con partículas de vidrio de diferentes tamaños y evaluar su comportamiento, pues el mecanismo de locomoción se cumple aunque el medio ya no sea un fluido. La meta es aplicarlos para censar la condición o la calidad de granos en silos, finalizó.
(UNAM/DICYT)
Notas relacionadas
 Un robot de ADN ordena moléculas ‘pasito a pasito’
Un robot de ADN ordena moléculas ‘pasito a pasito’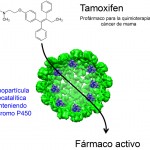 Nanopartículas que mejoran la eficacia de la quimioterapia
Nanopartículas que mejoran la eficacia de la quimioterapia Nanobots en concreto reducen efectos de gas invernadero y calentamiento global
Nanobots en concreto reducen efectos de gas invernadero y calentamiento global ¿Pueden los microorganismos ayudarnos a alimentar mejor a la población mundial?
¿Pueden los microorganismos ayudarnos a alimentar mejor a la población mundial? Nanotecnología para detener al Covid. Nanopartícula que ataca directamente su información genética
Nanotecnología para detener al Covid. Nanopartícula que ataca directamente su información genética Crean los primeros biobots o robos vivos, capaces hasta de auto curarse
Crean los primeros biobots o robos vivos, capaces hasta de auto curarse





